
The Evolution of the In-Vehicle Network
By: Hope Bovenzi, Astera Labs
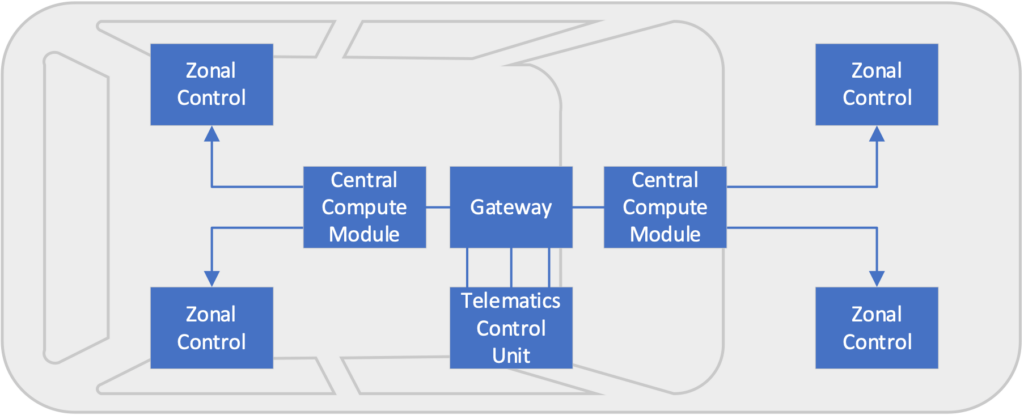
For over a decade, the car has seen an accelerated evolution. The automotive industry has moved away from building a computer within a car to building a car around a computer – so much so that the car has shifted from a handful of electronic control units (ECUs) within a vehicle in the early 2000s to hundreds in modern vehicles. Simply integrating more computers into a car is no longer sustainable and connectivity across domains must be streamlined. The era of zonal architectures (Figure 1) is here but that means mass data transfer throughout the car is just getting started.
A key ecosystem impacted by this evolution is the In-Vehicle Network. The In-Vehicle Network allows OEMs to cope with the increasing volume of data that needs to be transferred and stored around the car. In fact, vehicle systems are approaching 1TB of data storage needed to properly operate. These separate domains in the current vehicle architecture may communicate within themselves today, however, domains must be able to talk to one another as complexity of the In-Vehicle Network increases to support new capabilities.
Before diving into how best to connect the connected car, let’s answer a few questions about what’s driving this need in the first place and how these trends are impacting the infrastructure of the car.
Electrification
With an eye on combating global warming, there is a universal movement to reduce fossil fuel usage. Activists, consumers, and regulatory bodies alike are putting pressure on OEMs to reduce auto emissions that contribute to 28% annual greenhouse gases in the United States alone. Because of this, OEMs are increasing the percentage of hybrid and fully electric vehicles in their fleets, with some OEMs pledging full electrification within the next few decades.
For the In-Vehicle Network, battery management for electrification must connect to multiple domains for range, location, and trip information. Calculating the range of vehicle, one must take into account distances, energy output across that distance, and be able to communicate that information back to the driver via the trip planner of the vehicle’s infotainment system.
Connectivity
The automotive industry has not shied away from the “Internet of Things” trend and consumers expect the same level of connectivity in the car as they do from their phone and smart home assistants. The need for information on demand and the want for consumable entertainment has driven the expectation of seamless connectivity transition from home to car to work.
Since the early 2000s, the onset of OnStar® and emergency calling (eCall) legislation in the EU, cars have increasingly incorporated some sort of wireless connectivity device (previously a cellular modem). Now, with the movement of data between the cloud to the car, previously untapped opportunities are now available for mobility-as-a-service businesses, fleet management in commercial vehicles (such as tracking location, vehicle health monitoring, mobility data of fleet vehicles), but also Vehicle-to-X in consumer vehicles. Using Vehicle-to-cloud (a subset of Vehicle-to-X) as an example, OEMs can save money on recalls by doing remote software updates instead of having to bring cars into dealerships. This means, however, that not only does there have to be connectivity from the cloud to the car, but there must be higher degrees of inter-domain connectivity in order to do a software update to a “remote” domain within the car.
Autonomy
Autonomous vehicles aren’t a sci-fi, futuristic pipe dream but more prevalent than most people realize. With a spectrum, or levels of autonomy, ranging from 0 to 5, there are more “autonomous vehicles” on the road than meets the eye. Typically, new vehicles nowadays are in the level 1 to level 2.5 autonomy while autonomous taxis are in development with level 5 systems. Believe it or not, autonomous systems provide significantly safer experiences compared to an unassisted human, whether it’s a driver assist function or the elimination of the driver all together.
One of the primary factors propelling change to the In-Vehicle Network is the Advanced Driver Assistance Systems (ADAS). Reliable data communication has become even more important for systems to follow functional safety standards (ISO-26262) as autonomy levels increase. But furthermore, LiDAR, Radar, and camera inputs must be positioned all around the car, sensor aggregation needs continuously increase, and transferring that sensor information to be processed requires real-time responses with highspeed, reliable, low latency data communication.
Design Challenges within the In-Vehicle Network
From OEM to OEM, the In-Vehicle Network produces its own set of unique challenges. Older OEMs have had to evolve with the market from functional ECUs to domain controllers to zonal control, which creates a complex entanglement of cabling, cost, and weight. Newer OEMs have the benefit of building a car from the ground up but choosing the right highspeed link for data transfer is no easy feat due to the lack of standardization.
OEMs, new and old face a variety of challenges:
Complexity
When it comes to connectivity, there is a wide variety of interconnects that a vehicle can leverage from CAN, LIN, FlexRay, SerDes, MOST, PCI Express® (PCIe®), and Ethernet. Each of these communication methods come with their own strengths and weaknesses but there is an increasing priority on bandwidth, reliability, latency, and even the amount of physical cabling required. PCIe and Ethernet have been seen as preferred connectivity protocols that balance these priorities when designing a domain/zonal based automotive system.
Latency
Not only do the trends towards electrification, connectivity, and autonomy require higher bandwidth, but lower latency is also vital to reduce delays in accessing and making sense of the high volumes of data. Latency is a factor often highly ranked in importance in a system but if we take a step back to think why it will be important to automotive, it becomes quite clear.
For example, say there is an ADAS sensor present in the vehicle that detects objects in the car’s path. Every fraction of a second that the sensor can relay the raw data to a CPU, for that CPU to recognize there is an object in the cars path, and then to relay that information to the driver or braking system of the impending danger and execute an evasive maneuver can quite literally save lives.
Reliability/Redundancy
From system integration to individual hardware designers, safety is a key goal for automakers at all levels of planning. As with all major forms of transportation, getting the passenger from point A to point B safely is paramount. With safety increasingly dependent on advanced sensors and cameras, connectivity must be reliable and robust, despite EMI, temperature variations, and vibrations that are inherent to the driving experience.
There are safety standards in the automotive industry such as ISO-26262 that help standardize what designers must strive for. As it relates to communication protocols like PCIe and Ethernet, the need for redundancy is important – there cannot be a single point of failure in the system. For automakers, this translates to including multiple back up CPUs, sensors, and connections to ensure that if one system failed that there will be another to fill in until the vehicle can be serviced.
As you may imagine, if you need to include an additional CPU to act as a backup and have it share many of the same connections to the same sensor information from the ADAS domain for example, the number of PCIe lanes to plan for quickly rises. These redundant CPUs may also grow into heterogeneous compute architectures that will need to utilize low-latency, cache-coherent protocols like Compute Express Link™ (CXL™) over PCIe to unify interconnectors for I/Os, cache, and memory.
As automotive OEMs make the transition to higher performing PCIe technologies, the same challenges present in data center servers arise: channel insertion loss budgets decrease at faster speeds over longer links. Using a PCIe retimer for automotive will help engineers design the complicated nest of PCIe network that continues to grow in redundant CPU system architecture.
The Future of In-Vehicle Networks and Lessons from the Data Center
Although we cannot be sure how the In-Vehicle Network will continue to evolve, now is the time to redefine its future connectivity infrastructure. Automotive OEMs face a variety of challenges with ever-increasing amounts of data that needs to be robust despite environmental challenges in the car while also trying to reduce weight and size of interconnectivity. We also know that based on the trends we see in the market regarding electrification, connectivity, and autonomy, the In-Vehicle Network must cope with large amounts of data that will need to be reliably, safely, and securely transferred to and around the vehicle.
Conclusions
Interconnect technologies will play an important role in the overall connected car story to meet the needs of mass data transfer within the In-Vehicle Network. We have recently seen these types of challenges and a similar evolution in enterprise data centers, where intelligent systems running data-intensive workloads – such as Artificial Intelligence and Machine Learning – have drastically increased the overall design complexity. Although data rates in the automotive world are slower than those in data centers, the industry can benefit greatly from trusted connectivity experts who have experience in overcoming performance bottlenecks in data-centric systems.
Astera Labs is the proven leader for enabling complex architectures in the cloud and data center markets, but our expertise is not restricted to just that segment. As vehicles increasingly transform into high performance “servers on wheels”, we simply see them as just that – a new system design challenge for us to solve. Our ability to identify and address connectivity challenges is already well positioned and we look forward to supporting exciting world of automotive.